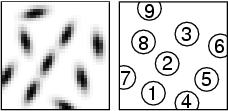
| Demo 13.6. Contour integration process.
This animated version of Figure 13.6
shows how the neurons in the PGLISSOM orientation map synchronize
their spiking activity to represent continuous contours. The input
presented to the network is shown in gray-scale coding at left, the
areas of the map that respond to the different input elements are
delineated with circles in the middle, and the neural spiking in the
54 × 54 GMAP is shown as black and white dots at right (black means
the neuron is spiking at the current time step, white means that it is
not spiking). Each contour was composed of three contour elements
(numbered 1, 2, and 3), embedded in a background of six randomly
oriented elements. Each contour runs diagonally from lower left to
top right with varying degrees of orientation jitter.
PGLISSOM performs contour integration through synchronized and
desynchronized neural activation: Neurons that represent elements of
the same contour spike at the same time, and those that represent
elements in different contours spike at different times. Through
self-organization, principles of good continuation and proximity have
become encoded in the excitatory lateral connections, i.e. neurons
that represent collinear or co-circular paths tend to be connected.
The lateral connections mediate synchronization, and as a result,
PGLISSOM groups collinear and co-circular elements together into
continuous contours.
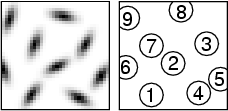
This experiment demonstrates contour integration performance with four
different degrees of orientation jitter, i.e. misalignment of the
contour elements. In all cases, the background elements are
unsynchronized. The contour is very strongly synchronized for
0o and 30o but relatively weakly synchronized
for 50o and 70o of orientation jitter. In other
words, the contours get harder to detect as the jitter increases, as
they do in humans (Figure 13.7).
The model therefore gives a computational explanation for the human
contour integration process in terms of self-organized lateral
connections and synchronization.
Previous demo;
Next demo
|